控制傅立叶表示
获得精确解所需的傅立叶项的数目取决于载荷的变化以及结构响应在周期内的变化。在确定术语数时,请记住这种分析的目的是进行低周疲劳预测。因此,我们的目标是在每一点上获得良好的近似塑性应变循环,局部不准确的应力是不大重要的。更多的傅立叶项通常提供更精确的解决方案,但以额外的数据存储和计算时间为代价。此外,傅立叶残差系数的精确积分要求在循环期间在足够数量的时间点处评估残差向量。Abaqus/Standard使用梯形规则(假定残差随时间增量呈线性变化)来积分残差系数。对于精确的积分,时间点的数目必须大于傅立叶系数的数目 (等于2n+1,其中n表示傅立叶项的个数)。Abaqus/Standard将自动减少用于下一次迭代的傅立叶系数的数量,如果发现它大于完成一次迭代所需的增量数量。
Abaqus/Standard使用自适应算法来确定傅立叶项的数量。
默认情况下,Abaqus/Standard从11项开始,并使用前面描述的迭代方法确定结构的响应。一旦获得收敛 (通过确保傅里叶级数中的所有剩余矢量系数和位移系数的所有修正足够小来测量)Abaqus/Standard通过确定在循环期间的所有时间点是否满足平衡来评估是否使用了足够数量的傅里叶项。如果在所有时间点都满足均衡,则该解被接受。否则,Abaqus/Standard增加傅里叶项的数目(默认添加5项)并继续选代方案,直到获得与新数目的傅里叶项的收敛。重复这个过程,直到达到平衡或直到傅立叶项的最大数目已被使用。图2最好地说明了这一方案,当Fourier项的个数等于21时,得到局部平衡和全局收敛。默认情况下最多使用25个傅立叶项。定义直接循环步长时,您可以指定Fourier项数的初始数和最大数以及项数的增量。
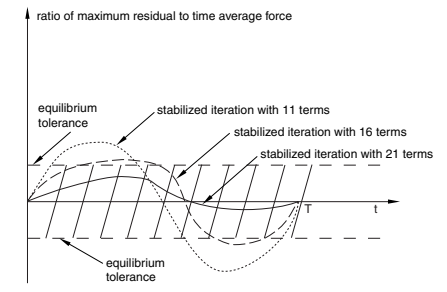
图2:具有不同傅立叶项的稳定迭代。
您还可以使用Abaqus/Standard设置的适当默认值,定义收敛准则,用于确定收敛以及确定是否在周期的所有时间点达到平衡(请参见常用控制参数)。
在未达到稳定周期的直接循环分析中,您可以在重新启动时增加迭代次数或傅立叶项,从而允许继续分析。
Abaqus/Standard在消息(msg)文件中提供每个时间点的最大残差、最大残差系数、最大位移系数、对位移系数的最大校正以及每次迭代结束时的傅立叶项数的详细输出。下文将更详细地描述这一输出。
输入文件用法:*直接循环
初始项数,最大项数,递增项数
步骤模块:创建步骤:一般性意见:直接循环,增量:傅立叶项数:初Abaqus/CAE使用方法:始:初始项数,最大值:最大项数,增量:项数增量
温馨提示:
此文档为达索官方英文文档翻译,尽管我们已经尽力确保准确性,但在翻译过程中可能会有一些错误或细微差别。如果想要了解官方原版,可联系客服进行索取。