


大兆瓦风电齿轮箱动力学模型的响应标定与修正
引言
风力发电是清洁能源的重要组成部分。经过二十多年的发展,我国风电能源的比重已显著提高。随着风电技术的发展,轻量化、高功率密度、低振动是重要竞争指标。振动是风机传动链不可避免的现象,如齿轮箱振动与噪声、风机纯音、叶片挥舞振动等。为了能从源头和设计初期控制、优化齿轮箱振动噪声,就需要可信度高的计算分析手段。动力学分析是重要的分析方法,但其可信度受输入参数、经验和试验等方面影响较大。如何建立可信度高的动力学模型,并形成经验方法,在产品中闭环应用是齿轮箱制造商的重要挑战,也是面对国际竞
争的必要能力。GL2010 和 IEC 61400-4 对传动链动力学分析提出了要求,模态风险分析是传动链设计的重要依据。在风电传动链动力分析方面,国内外学者已对齿轮系统动力学性能进行了大量的研究工作。激励分析与优化方面,刘文等采用了 31 自由度弯−扭−轴耦合参数动力学模型,求解各级齿轮副传动误差;以传动误差为激励,对风电齿轮箱噪声进行预估。Bozca以齿轮几何参数为优化设计变量,对箱体的振动噪声进行优化。Faggioni 等开展了齿形修形、传递误差度齿轮箱振动的影响研究。模态分析与优化方面,林腾蛟等采用考虑刚度、误差和冲击激励的齿轮箱有限元模型,以壳体表面振动加速度为目标,优化了设计参数组合。在动力学模型修正与校准方面,费庆国等[7]将方差与回归分析应用于响应面建立与参数修正,校准了Garter飞机模型。郭勤涛等[8]采用响应面方法的近似模型,用于快速迭代修正有限元模型。
1 齿轮箱动力学建模
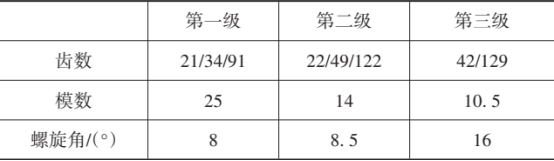
本文中以两行星级一平行级的主流机型大兆瓦风电齿轮箱为研究对象,其额定功率为5. 2 MW,额定输入转速为10. 2 r/min,齿轮参数信息如表1所示。动力学建模方法采用经验建模方法,此为行业内多年工程师经验积累的方法。
表1 齿轮参数信息
Tab. 1 Gear parameter information
必要输入参数:①轴承几何尺寸、间隙和刚度矩阵。②柔性体:3D 几何模型。③齿轮:宏观参数,如模数等;微观参数,如螺旋线修形量等。④支撑边界:液压弹性支撑刚度和阻尼。⑤联轴器的扭转刚度、惯量、横向刚度。⑥工况参数:载荷、转速等。
轴承单元计算模型如图 1 所示。采用 ISO 16281标准中的方法计算刚度[9]。额定工况的轴承刚度矩阵将与供应商的轴承刚度矩阵进行对比。柔性体缩减模型如图2所示。采用有限元建模,控制零部件的网格质量,控制质量与惯量偏差。采用 Craig-bampton缩减方法提取超单元,只保留必要主节点。齿轮单元模型如图3所示。
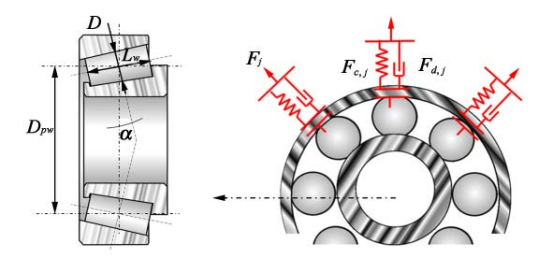
图1 轴承单元计算模型
Fig. 1 Bearing unit calculation model
采用赫兹接触方法计算啮合刚度,采用 Weber/Banaschek方法考虑轮辐、轮齿弯曲影响。支撑边界建模方法:齿轮箱通过液压弹性支撑放置于台架支座,采用弹簧阻尼器单元考虑其3个平动刚度和扭转刚度。
输入边界建模方法:齿轮箱输入端为主轴与行星架刚性连接,因此,采用共节点方法,即处理为一体。
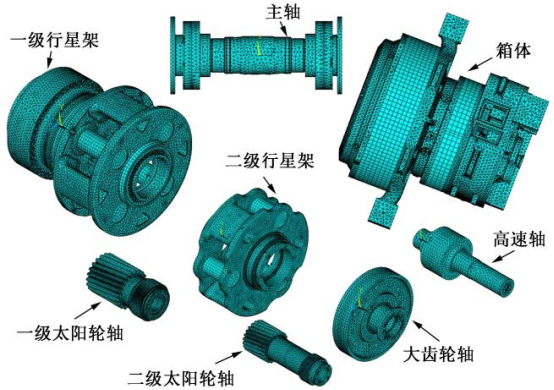
图2 柔性体缩减模型
Fig. 2 Flexible body condensation model
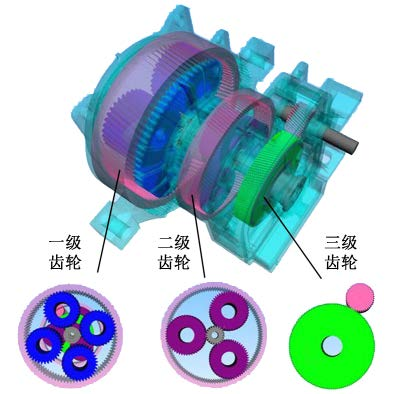
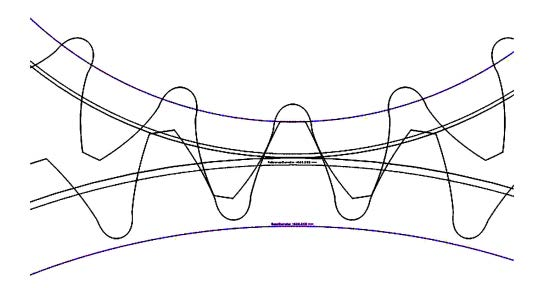
图3 齿轮单元模型
Fig. 3 Gear unit model
输出边界建模方法:输出端为连接高速轴与电机轴的万向节联轴器,建模采用考虑扭转、平动和倾斜刚度的联轴器单元。
阻尼建模方法:柔性体采用模态阻尼比 0. 02,轴承单元采用阻尼比 0. 05,齿轮单元采用阻尼比0. 01,液压弹性支撑单元采用阻尼比0. 1。经建模,齿轮箱在台架上传动链模型如图 4所示。
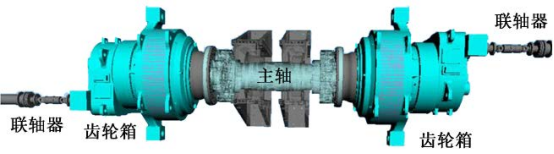
图4 齿轮箱台架动力学模型
Fig. 4 Gearbox bench dynamics model
2 模型标定
2. 1 振动测试实验
测试台架为 16 MW 背靠背台架,台架布局示意图如图 5 所示。试验工况中,输入功率为 5. 2 MW,输入转速为10. 2 r/min。采集主试齿轮箱箱体的振动加速度。
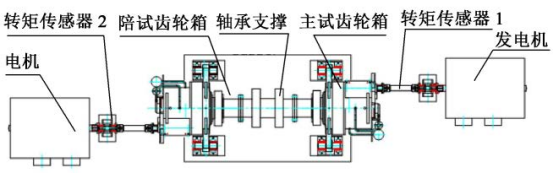
图5 台架布局
Fig. 5 Bench layout
主要测试硬件设备如表 2 所示。B&K 采集系统采样率为8 192 Hz,谱线数为1 600。
表2 测试硬件
Tab. 2 Testing hardware

振动测点位置:①高速下风侧轴承座外侧。②高速下风侧轴承座径向。③高速上风侧轴承座径向。④中速轴下风侧轴承座外侧。箱体振动测点如图6所示。
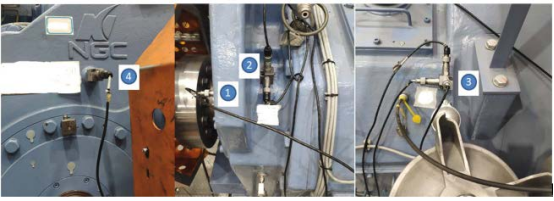
图6 箱体振动测点
Fig. 6 Box vibration measuring point
2. 2 振动响应标定
仿真分析采用相同的额定工况,输出对应4个测点的振动加速度值。抽取测点时域信号,对比如图7所示。仿真、测试的时域信号幅值量级相近。取频率区间[10 2 000]Hz的振动加速度频谱,对比如图8所示。齿轮啮合阶次Fz1及其倍频、阶次Fz2及其倍频
均相符性好。
幅值差异数值展示如表 3 所示。齿轮啮合阶次Fz1及其倍频、Fz2及其倍频的测试与仿真偏差较小,这说明经验建模方法对动力学模型做了较多约束,是一种比较可靠的建模方法。
表3 加速度频谱幅值对比
Tab. 3 Acceleration spectral amplitude comparison
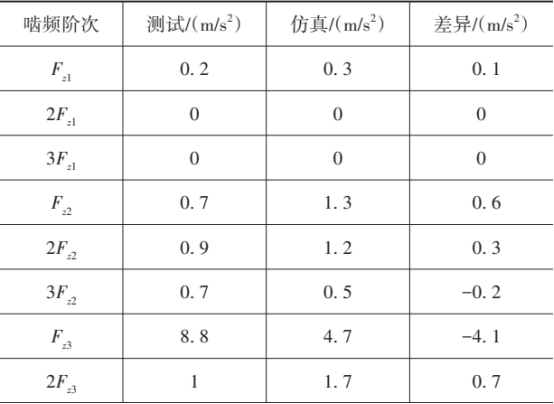
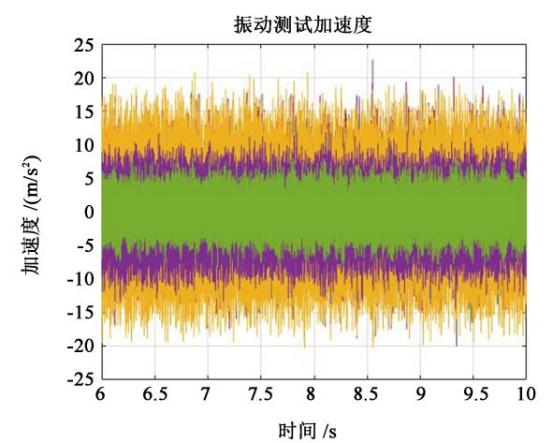
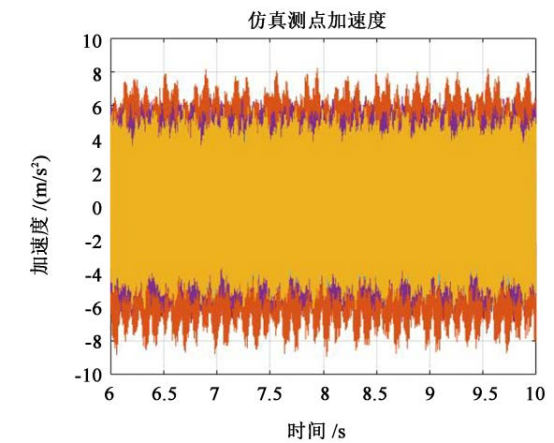
图7 测试、仿真加速度信号对比
Fig. 7 Comparison of acceleration signal of simulation and testing
依据业内的评判经验,差异值在3. 0 m/s2内为理想状态。从数据看,齿轮啮合阶次 Fz3有些偏差,需对模型修正。
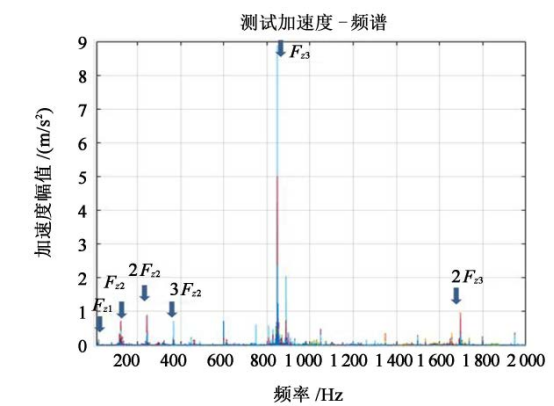
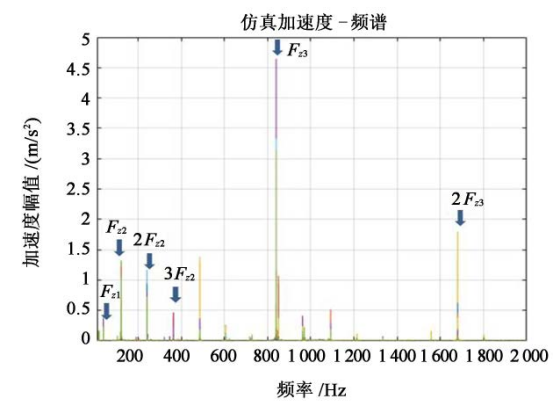
图8 测试、仿真加速度频谱对比
Fig. 8 Comparison of the test and simulation acceleration spectram
3 动力学模型修正
3. 1 灵敏度修正方法
灵敏度修正方法为一种参数寻优方法。参数寻优方法是将特征量定义为变量,通过变量与响应的函数关系,寻找最优值。优化设计的三要素为:设计变量、目标函数和约束条件。设计变量是发生改变从而提高性能的一组参数;目标函数是要求最优的设计性能,是关于设计变量的函数;约束条件是对设计的限制,是对设计变量和其他性能的要求。优化数学模型为
Minimize:f (X ) = f ( x1,x2,…,xn )
Subject:
gJ (X ) = 0( j = 1,…,m)
hk (X ) ≤ 0(K = 1,…,m)
XL
i ≤ Xi ≤ XU
i (i = 1,…,m)
(1)
式中,X 为设计变量,X=(x1,x2,…,xn);(f X)为设计目标;g(X)、h(X)均为约束设计响应。
DoE 试验可检验设计变量和设计响应在全局的相关程度,从而能够全面了解设计目标与设计变量之间的敏感特性。合适的设计样本点,需综合考虑变量设计水平和计算量。常用DoE试验有正交设计、CCD(中心复合设计)、BBD、OSF(超拉丁采样)、LSH(蒙特卡洛方法)、D-最优方法等。
近似模型技术是为提高求解效率发展而来的。MBS 分析计算时间长,且设计参数越多,计算时间越长。因此,近似模型十分必要。有了近似响应模型,可以快速地得到响应估计,不再重新计算 MBS模型,在优化迭代中十分高效。常用近似模型有多项式模型、线性回归模型、神经网络模型、遗传函数模型、Kriging dance模型等。
优化方法是根据目标寻找最优参数的方法。这些方法基本分两类:一是经典的机械优化方法,常见有最速下降梯度法、线性规划方法;二是现代优化算法,有蒙特卡洛方法、多目标遗传函数算法、模拟退火方法等。
3. 2 模型修正
动力学模型参数比较多,有不可变参数与可变参数。不可变参数如齿轮齿数,是齿轮箱的属性参数,为固定值。可变参数因数据可信度不同而存在差异。在参数变量选择时,应优先考虑不确定性更高的参数。比如,建模中未考虑的制造、装配公差,以及建模方法中因离散而产生的偏差,如惯量偏差等。参数选择如表4所示。经灵敏度分析,可以得到单参数波动对于响应的敏感程度,进而筛选出重要敏感参数,以进行下一步分析研究。最大振动波动如图9所示。
表4 参数变量
Tab. 4 Parameters variation
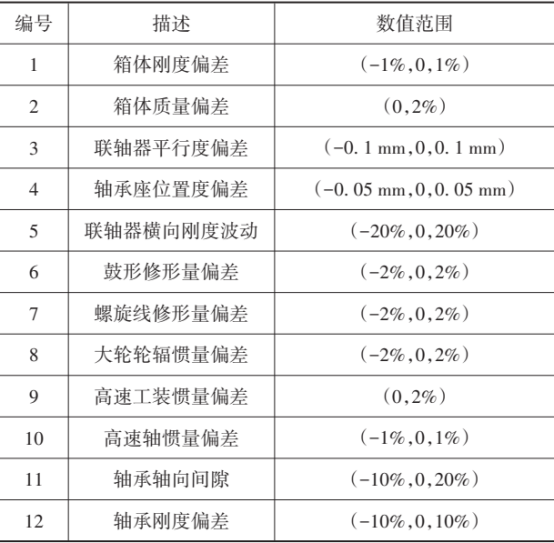
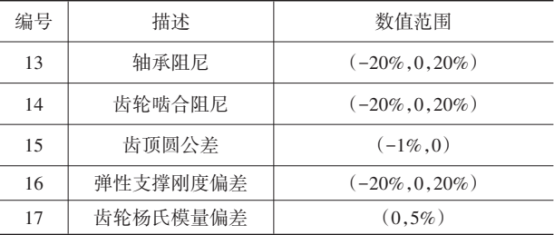
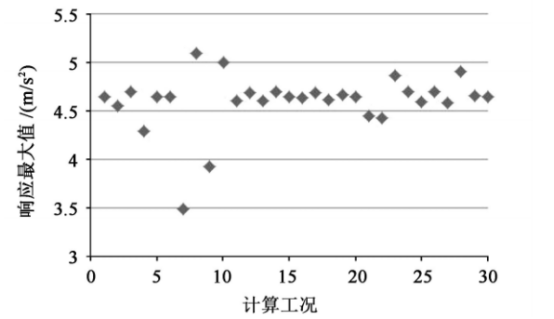
图9 敏感度参数研究表
Fig. 9 Sensitivity parameter study table
经分析,敏感度排序依次为:轴承座位置度偏差、联轴器横向刚度波动、液压弹性支撑刚度偏差、轴承阻尼。这 4 个参数为影响响应比较敏感的参数,取其为设计变量。考虑到 MBS 模型计算时间长。因此,Doe 试验应尽可能压缩计算次数。采用D-最优试验设计方法,可以将 4 个参数的计算次数压缩到 11次,极大缩短了计算时间。
建立快速近似模型,将设计变量与响应建立联系。快速模型可以在优化迭代中快速找到最优解,不再用 MBS 计算,极大缩短计算时间。采用线性回归分析方法,建立回归模型,预测值与真实值偏差如图 10 所示。预测值最大偏差 2%,平均偏差 1%,相关系数 R=0. 99,模型拟合偏差 R2=0. 99,表明拟合模型精度较高,符合要求。
表5 4参数归一化的Doe试验
Tab. 5 4 parameters normalized Doe test
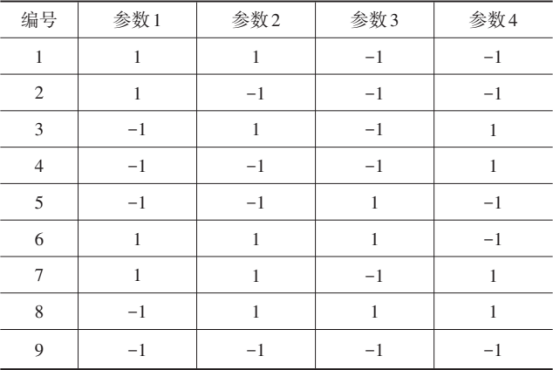
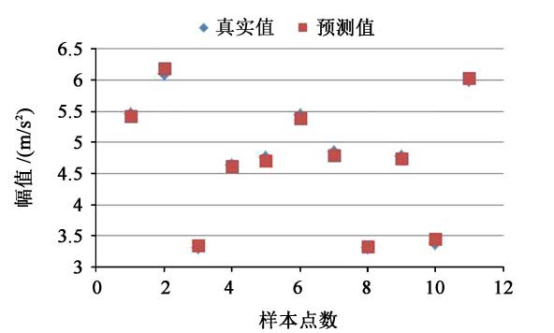
图10 回归模型预测值
Fig. 10 Regression model prediction value
采用经典的梯度下降方法,找到最优化的参数。经参数寻优,目标Y=2. 3,在参数轴承座的位置度偏差 x1=0. 05 mm,联轴器横向刚度波动 x2=−20%,液压弹性支撑刚度偏差 x3=−20%,轴承阻尼 x4=−20%。即响应值y=6. 5 m/s2。相较于初始模型,参数修正后的模型仿真与测试偏差有较大提升,表明模型中这4个参数是仿真中可修正参数。模型修正后,仿真预测精度有较大提升,对比结果如表6所示。
表6 模型修正后
Tab. 6 Comparison after model updating

4 结论
(1) 本文中所述的经验建模方法是一种比较可靠的动力学建模方法。计算结果在低频齿轮啮合阶次Fz1及其倍频、Fz2及其倍频的测试与仿真偏差较小。
(2) 采用参数灵敏度筛选分析方法,可知轴承座位置度偏差、联轴器横向刚度波动、液压弹性支撑刚度偏差和轴承阻尼这 4 个参数是对高速级啮频Fz3振动影响的敏感参数。研究的其他参数不敏感。
(3) 采用 Doe 试验设计、线性回归分析和参数优化方法,最终找到 4 个参数的合理值。计算响应偏差改善明显,表明 4 个参数取值需要在仿真模型中进行修正。
资料来源:达索官方






-
2026-07-06
-
2026-07-06
-
2026-07-03
-
2026-07-03
-
2026-07-03
-
[行业资讯] 达索官方7月 SIMULIA 线下技术培训时间预告
2026-07-02
-
[行业资讯] 达索系统 SIMULIA R2026x版本的结构仿真增强功
2026-07-02
-
[行业资讯] 通过SIMULIA和MODSIM在车辆设计中寻求平衡
2026-06-30
-
2026-06-30
-
[CST] 宽带天线选时域还是频域求解器?CST studio sui
2026-06-29
-
2023-08-29
-
2023-08-24
-
[ABAQUS] ABAQUS如何建模?ABAQUS有限元分析教程
2023-07-07
-
[ABAQUS] 有限元分析软件abaqus单位在哪设置?【操作教程】
2023-09-05
-
[ABAQUS] ABAQUS软件中Interaction功能模块中的绑定接
2023-07-19
-
[ABAQUS] Abaqus怎么撤回上一步操作?Abauqs教程
2024-05-01
-
[ABAQUS] abaqus里面s11、s12和u1、u2是什么意思?s和
2023-08-30
-
[ABAQUS] Abaqus单位对应关系及参数介绍-Abaqus软件
2023-11-20
-
[ABAQUS] Abaqus中的S、U、V、E、CF分别是什么意思?
2024-05-11
-
[ABAQUS] ABAQUS软件教程|场变量输出历史变量输出
2023-07-18
-
[行业资讯] 达索官方7月 SIMULIA 线下技术培训时间预告
2026-07-02
-
[行业资讯] 达索系统 SIMULIA R2026x版本的结构仿真增强功
2026-07-02
-
[行业资讯] 通过SIMULIA和MODSIM在车辆设计中寻求平衡
2026-06-30
-
2026-06-30
-
[行业资讯] Abaqus的许可和采购价格,Abaqus的价格和Toke
2026-06-18
-
[行业资讯] 宝马携手 SIMULIA 攻克电驱动系统的复杂性管理难题
2026-06-17
-
[行业资讯] 现代工程技术中,哪些领域最依赖力学原理?Abaqus软件应
2026-06-15
-
[行业资讯] 想了解Abaqus报价?第一步,找准达索授权代理商很重要!
2026-06-12
-
2026-06-11
-
2026-06-10
-
 汽车交通
汽车交通 -
 风能电源
风能电源 -
 船舶机械
船舶机械 -
 生物医疗
生物医疗
-
 土木建筑
土木建筑 -
 新能源
新能源 -
 高科技
高科技



地址: 广州市天河区天河北路663号广东省机械研究所8栋9层 电话:020-38921052 传真:020-38921345 邮箱:thinks@think-s.com

