近年来,我国城市轨道交通建设和运营得到了快速发展。截至 2022 年底,中国大陆地区(不含港澳台)共有 55 个城市开通城市轨道交通运营线路 308 条,运营线路总长度超一万公里[1]。其中,地铁运营线路 8008.17 公里,占比 77.84%。
传统多自由度车辆-轨道耦合动力学,将车辆考虑为多刚体系统,轨道基础系统中钢轨多采用梁单元模拟,并将他们之间的相互作用简化弹簧-阻尼单元。但是实际车辆轨道系统动力学是一个非线性耦合系统,因此需要创建更为精细的模型,以更加准确地分析车辆、轨道系统的动力学状态。同时通过计算并与实测结果进行对比分析,验证了模型的正确性,为地铁车辆轨道系统的振动响应提供了一种分析实现方法。
车辆-轨道耦合动力学模型
车辆-轨道基础耦合动力学模型通过轮轨接触关系将车辆系统的振动与轨道基础系统的振动耦合到一起,实现了车辆与轨道系统的实时耦合振动分析。本文采用有限单元法建立车辆-轨道-路基耦合系统动力学模型,整个系统的动力学振动方程可以表示为:
ABAQUS/Explicit 显式计算法基于中心差分法来求解有限元模型,每次求解迭代由上一增量步的计算结果“显式”地求解出下一个增量步,经多次迭代从而完成整个有限元模型的求解。

通过上述步骤获得初始响应后,可以按照加速度显式地求解出速度及位移响应,当增量步迭代达到设定分析时长后,即获得系统在整个分析步的动力学响应。
如图 2.1 所示,系统的有限单元模型主要包含轮对、构架、车体组成的车辆系统以及钢轨、扣件、弹性复合长轨枕、道床基础等组成的轨道基础系统,且车辆系统与轨道基础系统通过轮轨接触关系耦合起来,系统的激励源主要为轨道不平顺。
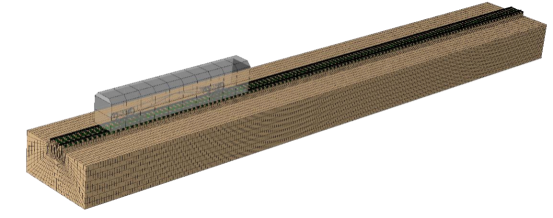
图 2.1 车辆-轨道-基础三维有限元耦合模型
车辆模型
车辆子系统的振动方程,也可描述为式(2.1)所示的质量矩阵、阻尼矩阵、刚度矩阵及外激励的形式。对于简单的动力学模型可以使用牛顿运动定律建立其运动方程,但是更具普遍性地,当车辆自由度较多时,哈密尔顿变分原理能够更有效地构建出系统的动力学方程[2]。
设系统的某一广义坐标为 、其一阶导数 即为相对应的广义速度。
通过上述原理便可以快速建立出系统动力学方程(2.1)中所示的质量阵 、阻尼阵 、刚度阵 以及力载荷向量 ,但此时的矩阵或向量维度要远小于(2.1)式中相应矩阵的维度,它只表示了车辆子系统所对应自由度的振动方程。
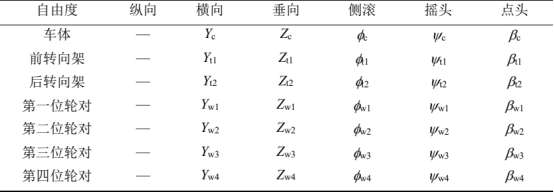
本文车辆多刚体模型采用六编组的地铁 B 型车,每节车辆由一个车体、两个构架及四个轮对组成,每个刚体考虑了表 2.1 中所示的横向运动、垂向运动、侧滚运动、摇头运动以及点头运动 5 个空间自由度,即每节车辆模型包含有 35 个自由度。
表 2.1 车辆模型中所考虑的自由度
为降低矩阵维度,提高计算效率,本文建立的详细三维有限元模型,所有部件均采用刚体。如图 2.2 所示,车辆模型的一系悬挂和二系悬挂采用三维弹簧-阻尼线单元模拟,轮对、构架以及车体的质量及转动惯量等属性直接集中加载到各部件的刚体质心上。车辆计算模型的参数参考文献[5]中 B 型车参数表所列,车辆的运行速度设置为 80km/h。
图 2.2 车辆有限元模型
轨道基础模型
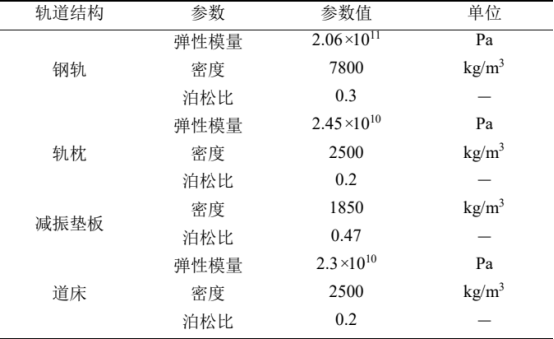
本文计算模型中轨道基础主要由钢轨、扣件、弹性长轨枕以及道床基础等组成,按照表 2.2 中所列出的参数建立三维实体有限元模型。
表 2.2 弹性复合长枕式减振轨道参数
(1) 钢轨、扣件
有限元模型中,扣件采用轨底对称分布的一组弹簧-阻尼单元模拟,其刚度、阻尼参数值按照扣件的参数来设定,其断面连接形式如图 2.3(a)所示;在纵向分布上,按照工程线路中扣件的布置方式,采用离散点支撑方式,如图 2.3(b)所示。
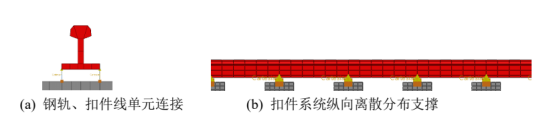
图 2.3 钢轨、扣件有限元模型
(2) 弹性长轨枕
如图 2.4(a)所示,弹性长轨枕有限元实体模型由两种单元类型构成:轨枕采用 C3D8 单元;承担减振作用的枕下弹性垫板,因其考虑橡胶材料的非线性、大变形等则采用 C3D8H 单元[6]。在有限单元模型中,为模拟橡胶与轨枕之间的贴合状态,在轨枕和橡胶弹性垫间设置接触,并且按照网格的疏密程度,将橡胶垫的接触面设置为主接触面。
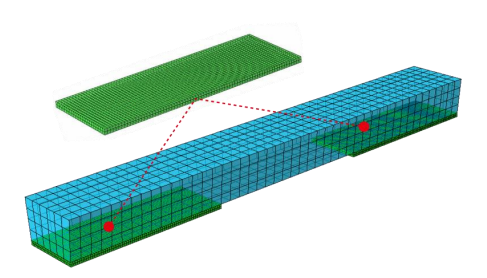
图 2.4 弹性长轨枕有限元模型
(3) 道床基础
如图 2.5 所示,道床基础跟轨枕采用一致的单元类型,即 C3D8 单元。在轨道基础上设有一定高度的承轨台,用于安置弹性长轨枕及钢轨、扣件等,对于承轨台所在区域的网格进行局部加密处理,而对轨道基础传递方向上的网格密度可以逐渐变得稀疏,在保证网格质量和计算精度的前提下,可大大提高模型的计算速度。
道床基础与钢轨、扣件、轨枕通过橡胶减振垫板连接。在实际轨道铺设中,将轨枕按照线路设计要求固定之后,将其直接浇筑到基础上,因此有限元计算模型中采用“Tie”连接方式。
为了更真实地模拟基础的无限边界特性,在基础的外围设置弹性人工边界层,并将弹性边界层的外围全固定约束,从而实现有限元模型中无限边界的模拟。
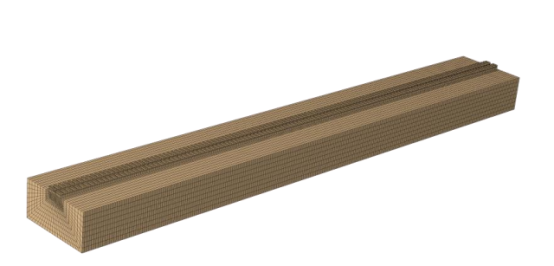
图 2.5 道床基础有限元模型
轨道不平顺
轨道不平顺是车辆-轨道耦合系统最主要的激振源,直接影响车辆系统及轨道系统的响应,因此选择合适的不平顺拟合谱对系统的动力学特征分析至关重要。由于我国城市轨道交通中没有统一、成熟的不平顺密度谱函数,本文选择美国轨道不平顺拟合谱。
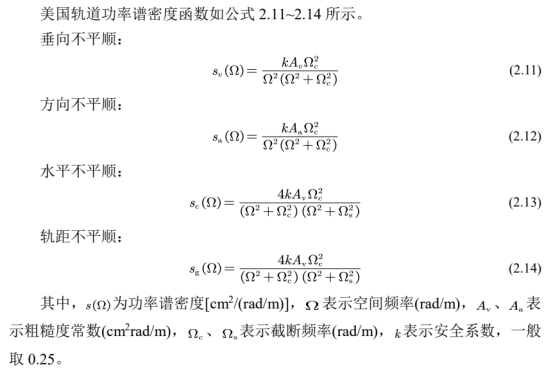
根据文献[13]中的车辆运行速度范围选取参数,生成美国六级谱轨道不平顺样本如图 2.6 所示,样本包括左、右轨道的高低不平顺及水平不平顺。通过自编程 MATLAB 脚本,将轨道不平顺按照钢轨节点坐标逐个插值叠加的方式施加到钢轨实体单元上,施加轨道不平顺后的局部钢轨如图 2.7 所示。
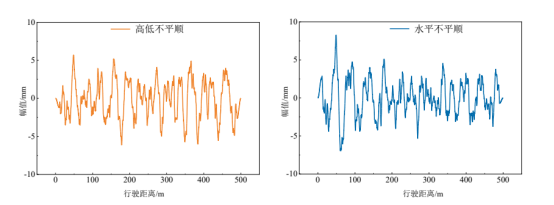
图 2.6 轨道不平顺样本
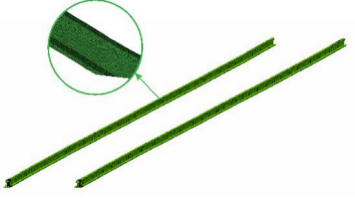
图 2.7 施加轨道不平顺的钢轨有限元模型
2.4 轮轨接触模型
轮轨相互作用是将车辆系统和轨道系统耦合的重要纽带,主要包括轮轨接触几何关系及轮轨相互作用力关系。轮轨空间接触几何关系的计算通常采用迹线法;轮轨相互作用力主要有轮轨法向力和蠕滑力。轮轨蠕滑力可用 Kalker 线性蠕滑理论计算,但考虑到车辆运行中,轮轨间蠕滑有可能达到饱和,因此需要用 ShenHedrick-Elkins 理论再进行非线性修正。
轮轨间的法向力由 Hertz 非线性弹性接触理论确定:

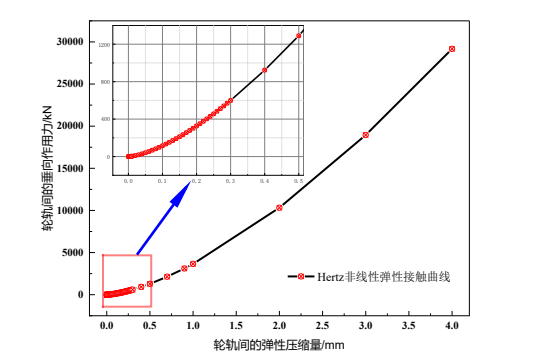
图 2.8 Hertz 非线性弹性接触曲线
纵向蠕滑力则采用 FASTSIM 算法,最终将车轮与钢轨耦合起来,完成后的轮轨有限元接触模型如图 2.9 所示。
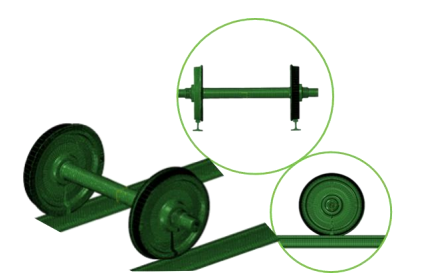
图 2.9 三维实体车轮-钢轨接触模型
3. 计算模型及其验证
为验证计算模型的准确性,按照第 2 节的建模思路建立如图 2.10 所示的车辆-轨道基础动力学模型,与现场实测数据进行验证。本文采用了西安地铁某标段的测试数据,主要对比参数为钢轨垂向位移及钢轨垂向振动加速度。现场实测标段运行的车辆为地铁 B 型车,采用六节编组,运行速度大约为70km/h,选取某钢轨断面处的垂向位移和振动加速度。
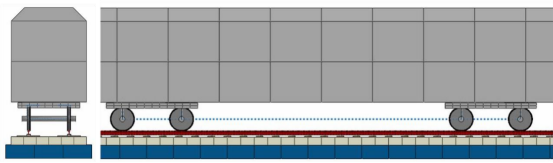
图 2.10 车辆-轨道基础有限元模型
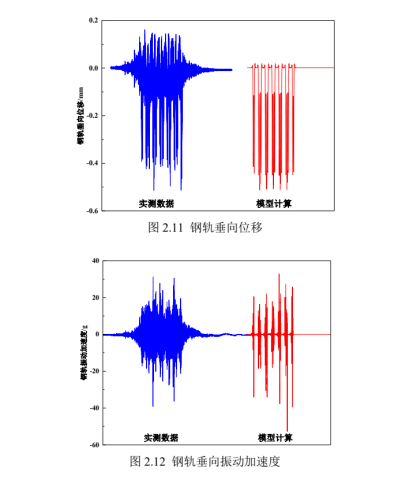
从图 2.11 和图 2.12 中对比可以发现:理论计算模型和现场实测的响应基本吻合,其中钢轨最大位移为 0.54mm,钢轨振动加速度则达到 40m/s2。表明本文中建立的车辆-轨道耦合动力学模型有效、准确,可用于后续计算工作中。
4. 结论
本文基于车辆-轨道耦合动力学理论,建立了精细化车辆-轨道耦合动力学模型,通过与线路实测数据的对比分析,验证了该有限元模型的准确性。为地铁车辆-轨道系统的动力学响应分析和研究提供了一种新的思路和实现方法。
资料来源:达索官方